
Блок питания для Raspberry Pi 3 5 В 2 А с выключателем кабель Micro Usb адаптер переменного
79,21 - 288,16 руб.



Новое поступление
Характеристики
*Текущая стоимость 838,08 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Mar-20-2026 | 997.62 руб. | 1047.76 руб. | 1022 руб. |
| Feb-20-2026 | 989.23 руб. | 1038.16 руб. | 1013.5 руб. |
| Jan-20-2026 | 830.41 руб. | 872.89 руб. | 851 руб. |
| Dec-20-2025 | 972.71 руб. | 1021.52 руб. | 996.5 руб. |
| Nov-20-2025 | 846.35 руб. | 888.14 руб. | 867 руб. |
| Oct-20-2025 | 955.40 руб. | 1003.86 руб. | 979 руб. |
| Sep-20-2025 | 947.15 руб. | 994.63 руб. | 970.5 руб. |
| Aug-20-2025 | 939.32 руб. | 986.72 руб. | 962.5 руб. |
| Jul-20-2025 | 930.85 руб. | 977.65 руб. | 953.5 руб. |
Описание товара






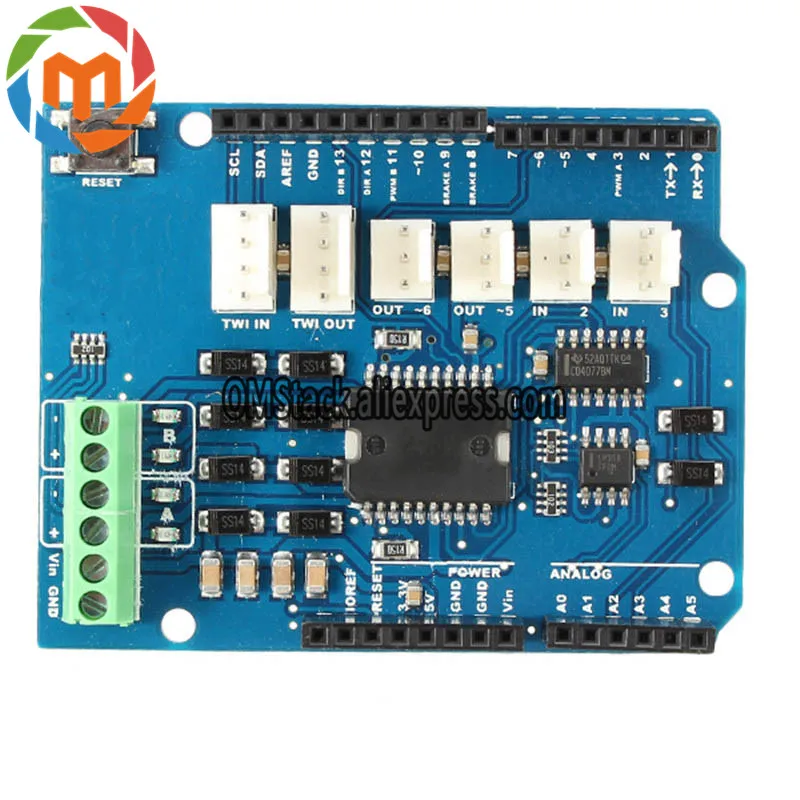
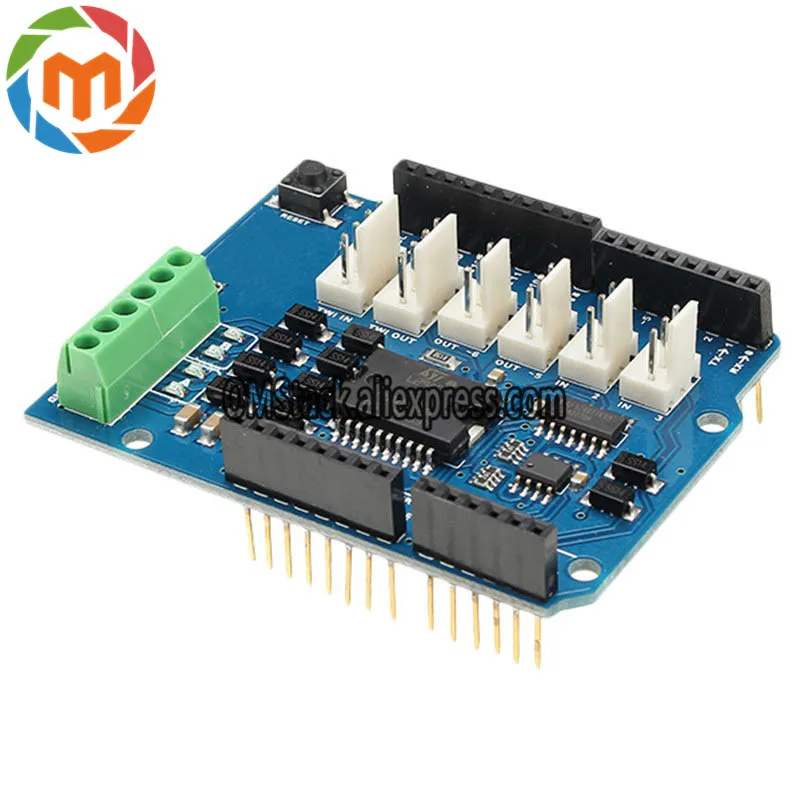
L298N L298P 4A двухканальный модуль водителя мотора двигателя Щит R3 для Arduino
Описание:
Моторный щит основан на L298, который является двойным полноценным драйвером моста, который предназначен для привода индуктивных нагрузок, таких как реле,
Соленоиды, DC и шаговые моторы. Это позволяет вам водить два двигателя постоянного тока с вашим для Arduino платы, контроль скорости и направления каждого одного независимо. Также можно измерять моторное текущее всасывание каждого мотора, в числе других функций. Щит работает в TinkerKit совместимый,
Что означает, что вы можете быстро создавать проекты путем включения модулей TinkerKit в совет.
Особенности:
-Рабочее напряжение: 5 В ~ 12 В
-Контроллер двигателя: L298P, приводы 2 DC Моторс или 1 шаговый мотор
-Максимальный ток: 2А на канал или 4A Max (с внешним блоком питания)
-Текущее измерение: 1,65 В/а
-Бесплатная Рабочая остановка и функция тормоза
О мощность:
Моторный Щит должен быть включен только при помощи внешнего источника питания.
Поскольку IC L298, установленный на щитке, имеет два отдельных подключения питания,
Один для логики и один для водителя с мотором. Требуемая моторная сила тока часто превышает максимальный ток USB.
Внешний (неusb) питание может приходить либо от адаптера AC-DC (wall-wart), либо от аккумулятора.
Адаптер может быть соединен путем включения 2,1 мм центра-позитивная вилка в для мощности платы Arduino разъем на
Какие моторные щитки монтируются или соединяют провода, которые ведут блок питания к Vin и GND винтовые клеммы,
Заботясь о том, чтобы уважать полярность.
Во избежание возможного повреждения для платы Arduino, на которой установлен щит,
Рекомендуем использовать внешний блок питания, который обеспечивает напряжение между 7 и 12 В.
Если ваш мотор требует более 9 В, мы рекомендуем вам отделять силовые линии от щита и для Arduino board на
На котором установлен щит. Это возможно путем резки перемычки "Vin Connect", размещенной на задней стороне щита.
Абсолютный предел для Vin на винтовых клемм составляет 18 В.
Булавки питания являются следующими:
Vin на винтовой терминальной блоке-это входное напряжение к двигателю, подключенному к щиту.
Внешний блок питания, подключенный к этому контакту, также предоставляет питание для платы Arduino, на которой установлен.
Благодаря разделению "Vin Connect" jumper вы сделаете эту выделенную силовую линию для мотора.
GND наземный на винтовой клеммный блок.
Щит может поставить 2 Ампера на канал, для всего 4 амперес максимум.
О входе и выходе:
Этот щит имеет два отдельных канала, названных A и B, что каждый использует 4 для Arduino контактов, чтобы водить или чувствовать мотор.
В общей сложности на этом щите используются 8 контактов.
Можно использовать каждый канал отдельно, чтобы управлять двумя двигателями постоянного тока или объединять их, чтобы водить один однополярный Степпер-мотор.
Булавки экрана, разделенные на канал, показаны в таблице ниже:
Функция
Контакты на канал. A
Контакты на канал. B
Направление
D12
D13
ШИМ
D3
D11
Тормоз
D9
D8
Текущий зондирования
A0
A1
Если вам не нужен тормоз и текущее обнаружение, и вам также нужно больше контактов для вашего приложения можно отключить эти функции, отрезая соответствующие перемычки на тыльной стороне щита.
Дополнительные розетки на щитке описаны следующим образом:
Винтовые клеммы для подключения моторов и их блока питания.
2 разъема TinkerKit для двух аналоговых входов (в белом), подключенных к A2 и A3.
2 разъема TinkerKit для двух выходов Aanlog (в оранжевом в середине), подключил к PWM выходы на булавки D5 и D6.
2 коннекторы TinkerKit для интерфейса TWI (в белом с 4 контактами), один для ввода и другой для выхода.
Двигатели соединения:
Щеткой двигатель постоянного тока. Вы можете водить два матовых электродвигателя постоянного тока, соединяя два провода в каждом из них (+) И (-) Винтовые клеммы для каждого канала A и B. таким образом вы можете контролировать его направление, устанавливая высокие или низкие контакты DIR Aand DIR B, Вы можете контролировать скорость в зависимости от значения PWM A и PWM B. Тормоза и шпильки, если установлен высокий, эффективно тормозит двигатель постоянного тока, а не позволит им замедлиться путем резания мощности. Можно измерить ток, проходящий через двигатель постоянного тока, прочитав SNS1 и SNS1 pins. На каждом канале будет напряжение, пропорциональное измеренному текущему, которые можно читать как обычный аналоговый вход, через функцию analogRead () на аналоговый вход A0 и A1. Для Вашего удобства она калибрована, чтобы быть 3,3 В, когда канал обеспечивает максимально возможный ток, что является 2A.
Посылка включает в себя:
1 х модуль драйвера двигателя





Смотрите так же другие товары:





